Linear Servo Actuators







Linear Servo Actuators
Published 2018-10-23T11:19:46+00:00
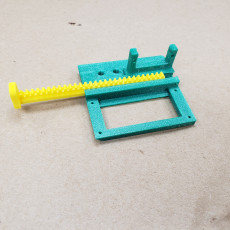
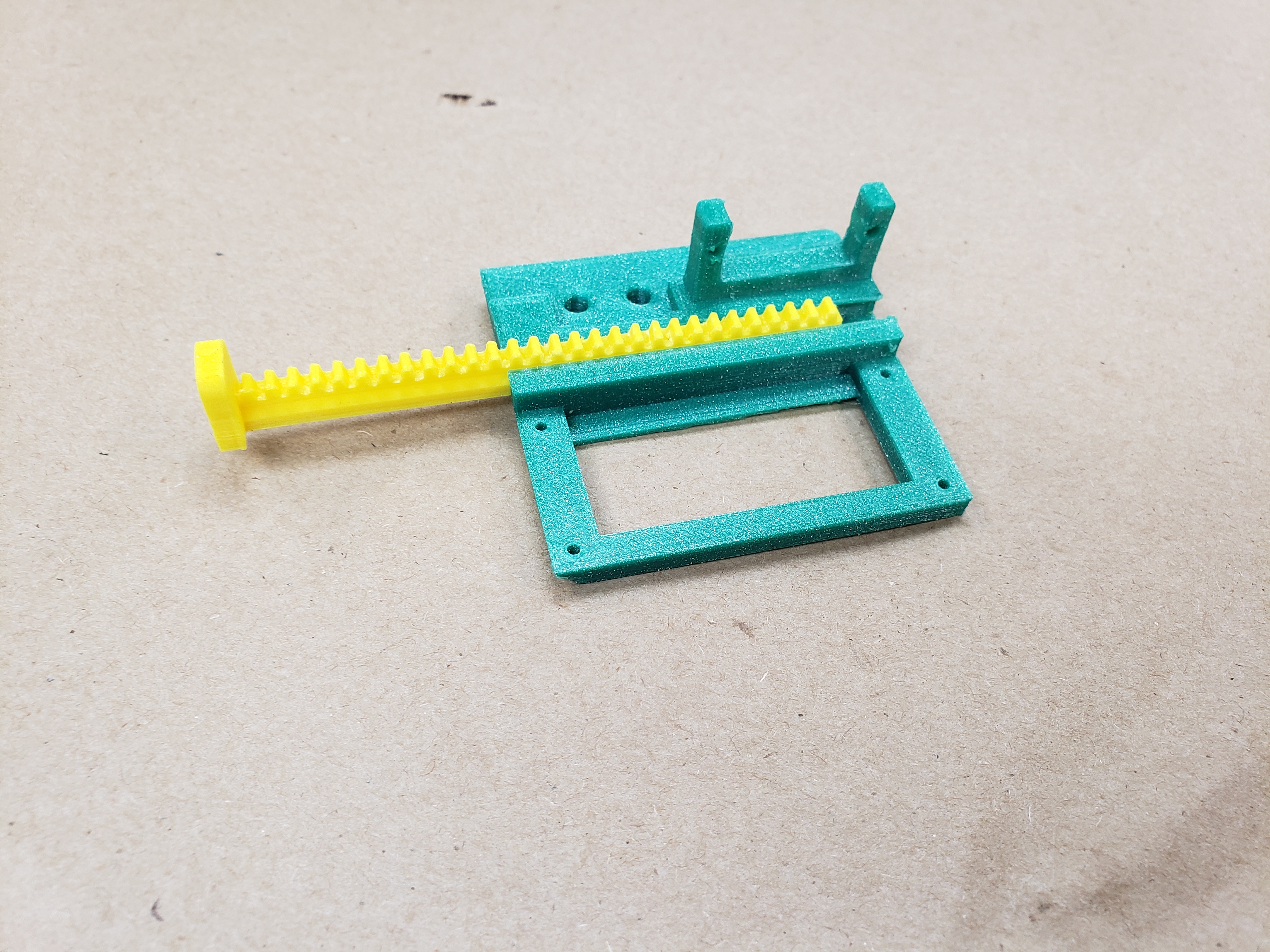
This is a general purpose linear servo actuator (pusher style). Two sizes have been designed, for different space constraints and force outputs.
These use continuous rotation servos which helps keep the cost very low. Off the shelf actuators of this type can cost around $70 USD.
The “mini” version will fit in smaller spacers, but has a much lower force output. The “large” version has a higher force output, but is...larger in size than the “mini”.
Here is a video that shows how to assemble and run both sizes:
https://youtu.be/2vAoOYF3m8U
**Please note that the best way to show your appreciation and keep up to date on my latest 3D printing projects is to head over to my YouTube channel and subscribe!**
https://www.youtube.com/potentprintables
Some inspiration for this design came from:
https://hackaday.com/2016/03/31/3d-printed-case-turns-servo-into-quality-linear-actuator/
Included in the files here are a list of materials for each size, as well as affiliate links for the non 3D printed parts.
------------------------------
STL quantities to print:
Mini version-
Motor Bracket, Mini Version {QTY 1x}
Pinion Gear, Mini Version {QTY 1x}
Large version-
Motor Bracket, Large Version {QTY 1x}
Pinion Gear, Large Version {QTY 1x}
Pusher- (works for both types, choose only the desired length and print QTY 1x)
75mm Long [gives stroke of ~50mm]
100mm Long [gives stroke of ~75mm]
125mm Long [gives stroke of ~100mm]
150mm Long [gives stroke of ~125mm]



Motor Brackets-
Printed in PLA
Printed “standing up”, with the long axis of the part along z.
Support was used
Raft was used
0.2mm layer height and 75% infill
Pinion Gears-
Printed in PLA
No support needed, with proper orientation
0.2mm layer height and 75% infill
| Date de publication | 23/10/2018 |
| Technologie | FDM |
| Complexité | Easy |
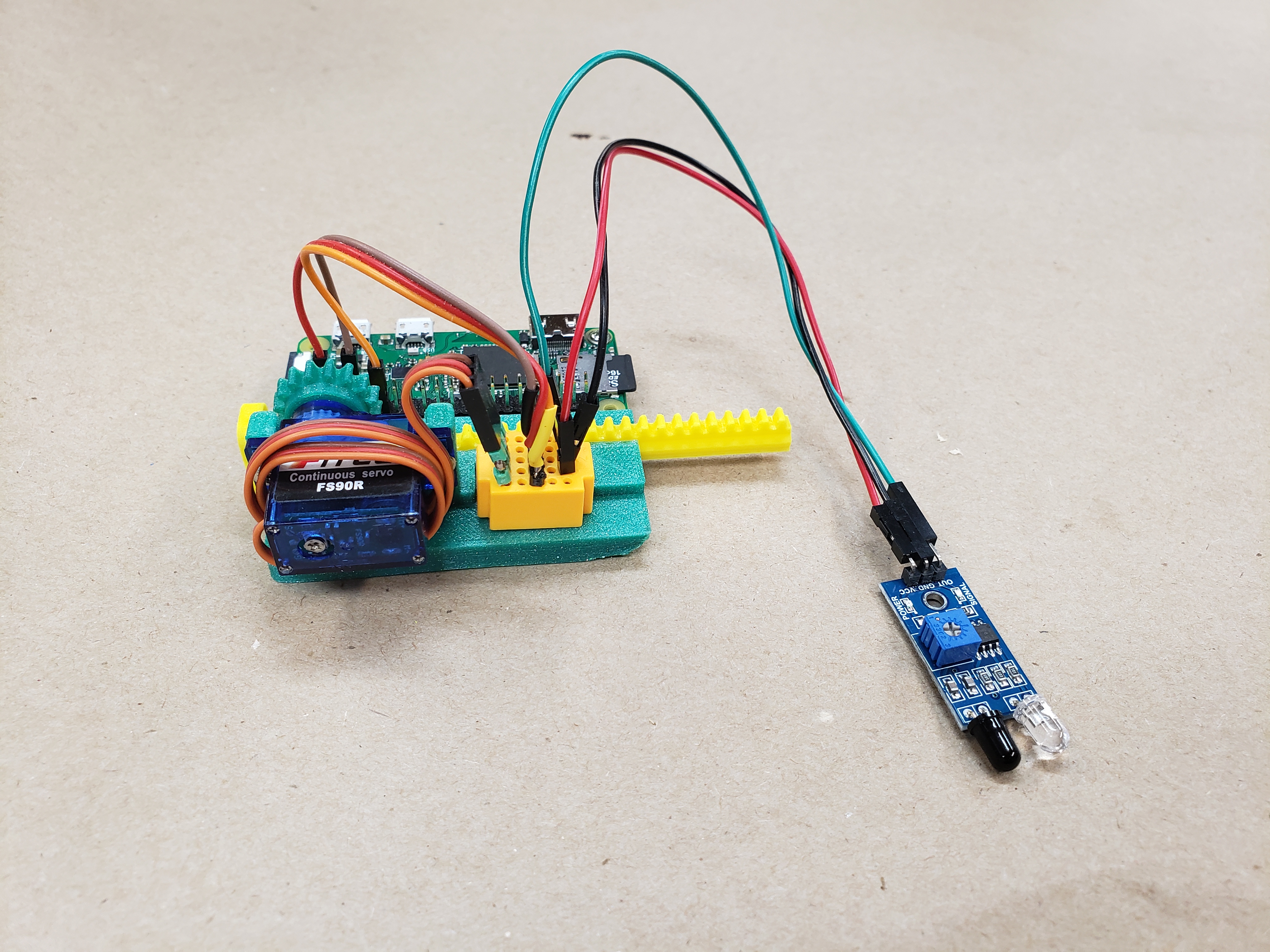
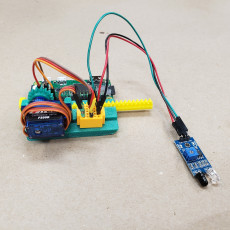
This was a terrific solution to a project I had, made all the better because Ali was thoughtful enough to include the STEP files, which, with Fusion360, allowed me to make significant modifications to his already excellent design. I also corrected some strange artifacts from the STEP files that showed up in my GCODE, not sure why: 0) I shaped the pusher on the slider to suit my use case but also so it could be printed horizontal without supports - a much better result, 1) the gear hole was MUCH larger than any servo axel I have ever seen. Corrected. 2) The 75mm slider was perfect, but the 100mm slider, even though the same height and width, would bind in the motor mount. Corrected. 3) I added structure to hold a Raspberry Pi Zero and a protoboard for connection to the servo and a proximity sensor. 4) There's a weird vestigial chamfer-like shape - resembling lift from the build plate - on one side of the motor bracket that I could not eliminate in this round, but let it go because the chamfer did not impact my application.